
-
-
-
Tổng tiền thanh toán:
-







Mã sản phẩm: 1701082
Thương hiệu: Nhập khẩu Loại: Arduino – Module – Cảm biến
Khối lượng: 100
Giúp bạn có thể điều khiển tốc độ và chiều quay của động cơ DC một cách dễ dàng, ngoài ra module L298 còn điều khiển được 1 động cơ bước lưỡng cực. mạch cầu H l298 động cơ có điện áp từ 5V đến 35V.

Mạch Điều Khiển Động Cơ L298 có tích hợp một IC nguồn 7805 để tạo ra nguồn 5V để cung cấp cho các thiết bị khác.
Thông số kỹ thuật
- Driver: L298N tích hợp hai mạch cầu H.
-Điện áp điều khiển: +5 V ~ +35 V
- Dòng tối đa cho mỗi cầu H là: 2A
- Điện áp của tín hiệu điều khiển: +5 V ~ +7 V
- Dòng của tín hiệu điều khiển: 0 ~ 36mA
- Công suất hao phí: 20W (khi nhiệt độ T = 75 ℃)
- Nhiệt độ bảo quản: -25 ℃ ~ +130 ℃
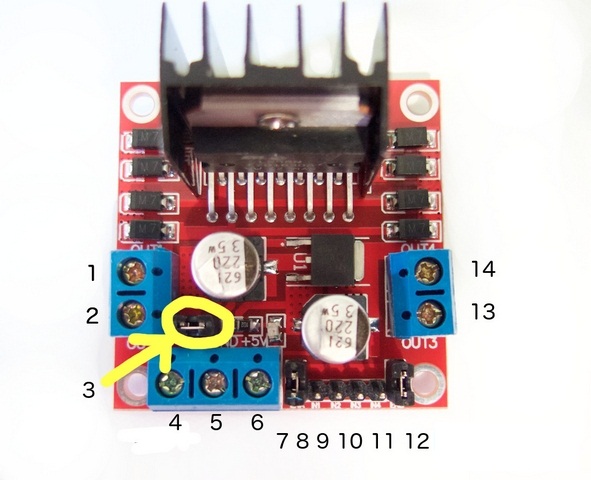
Các chân tín hiệu
| // connect motor controller pins to Arduino digital pins // motor one int enA = 10; int in1 = 9; int in2 = 8; // motor two int enB = 5; int in3 = 7; int in4 = 6; void setup() { // set all the motor control pins to outputs pinMode(enA, OUTPUT); pinMode(enB, OUTPUT); pinMode(in1, OUTPUT); pinMode(in2, OUTPUT); pinMode(in3, OUTPUT); pinMode(in4, OUTPUT); } void demoOne() { // this function will run the motors in both directions at a fixed speed // turn on motor A digitalWrite(in1, HIGH); digitalWrite(in2, LOW); // set speed to 200 out of possible range 0~255 analogWrite(enA, 200); // turn on motor B digitalWrite(in3, HIGH); digitalWrite(in4, LOW); // set speed to 200 out of possible range 0~255 analogWrite(enB, 200); delay(2000); // now change motor directions digitalWrite(in1, LOW); digitalWrite(in2, HIGH); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); delay(2000); // now turn off motors digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); } void demoTwo() { // this function will run the motors across the range of possible speeds // note that maximum speed is determined by the motor itself and the operating voltage // the PWM values sent by analogWrite() are fractions of the maximum speed possible // by your hardware // turn on motors digitalWrite(in1, LOW); digitalWrite(in2, HIGH); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); // accelerate from zero to maximum speed for (int i = 0; i < 256; i++) { analogWrite(enA, i); analogWrite(enB, i); delay(20); } // decelerate from maximum speed to zero for (int i = 255; i >= 0; --i) { analogWrite(enA, i); analogWrite(enB, i); delay(20); } // now turn off motors digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); } void loop() { demoOne(); delay(1000); demoTwo(); delay(1000); } |
Liên hệ:
Đ/c: 18/655 Nguyễn Văn Linh-P.Vĩnh Niệm-Lê Chân-Hải Phòng
Email: giaiphapchung68@gmail.com
Hotline: 0936824969
Bước 1: Lựa chọn sản phẩm cần mua bấm Thêm vào giỏ hàng Bước 2: Sau khi chọn hết sản phẩm thì bấm biểu tượng Giỏ hàng để thanh toán Trong mục này bạn có thể thay đổi số lượng, chủng loại sản phẩm và chọn mua thêm sản phẩm khác. Bước 3: Lựa chọn Thanh toán Bạn vui lòng nhập thông tin: Email, Họ tên, Số điện thoại và các thông tin cần thiết khác. Để theo dõi được đơn hàng của mình bạn vào mục Đăng nhập hoặc Đăng ký tài khoản rất dễ dàng. Bước 4: Xem lại thông tin đặt hàng, điền chú thích và gửi đơn hàng Bước 5: Sau khi nhận được đơn hàng bạn liên hệ 0393451866 để chúng tôi gửi hàng sớm nhất. Bước 6: Web chúng tôi có công cụ Kiểm tra đơn hàng ngay bên trên tay phải. bạn nhập SĐT để kiểm tra tình trạng đơn hàng nhé Trân trọng cảm ơn.







