
-
-
-
Tổng tiền thanh toán:
-
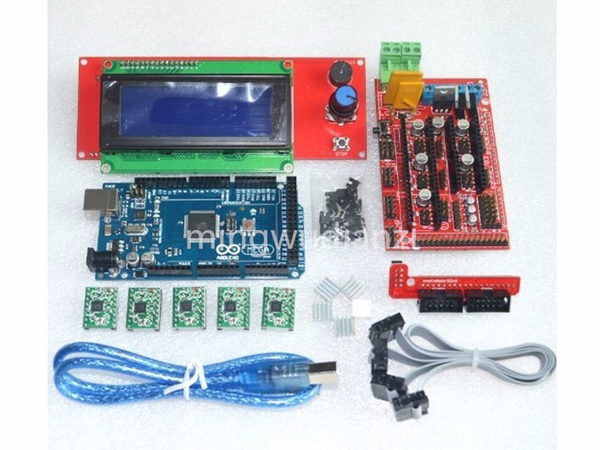



Mã sản phẩm: 1703020
Thương hiệu: Nhập khẩu Loại: Arduino – Module – Cảm biến
Khối lượng: 700
Bao gồm
Phần mềm này là một công cụ thiết yếu để sản xuất mã kiểm soát mà máy in 3d. Nếu không có nó, máy in 3d sẽ không nhận ra định dạng của mô hình 3D. Chỉ thông qua phần mềm vào mã G, máy in có thể được sử dụng bình thường. Slic3r là một công cụ lát rất tốt.
Tải về:
phiên bản Windows 32-bit: http://dl.slic3r.org/win/slic3r-mswin-x86-0-9-10b.zip
phiên bản Windows 64-bit: http://dl.slic3r.org/win/ slic3r-mswin-x64-0-9-10b.zip
phiên bản MAC: http://dl.slic3r.org/mac/slic3r-osx-uni-0-9-10b.dmg
Linux 32-bit phiên bản: HTTP: // dl.slic3r.org/linux/slic3r-linux-x86-0-9-10b.tar.gz
Linux 64-bit phiên bản: http://dl.slic3r.org/linux/slic3r-linux-x86_64-0-9- 10b.tar.gz
Nếu bạn muốn biên dịch mã nguồn của riêng bạn, vui lòng tham khảo: slic3r

Tải về:
phiên bản MAC: http://koti.kapsi.fi/~kliment/printrun/Printrun-Mac-12July2013.zip
phiên bản Windows: http://koti.kapsi.fi/~kliment/printrun/Printrun-Win- Slic3r-12July2013.zip
Nhiều phiên bản hơn Chọn: Printrun

Tải về: https://github.com/ErikZalm/Marlin/archive/Marlin_v1.zip
sau khi tải về, giải nén tất cả các file mà firmware mã nguồn, tìm thấy bên trong tập tin ino pde hoặc thư mục để mở phần mềm IDE marlin để sử dụng.
Xem thêm
Cài đặt trình điều khiển
MAC và các hệ thống Linux không cần phải cài đặt một cụ thể chút khổng lồ 2560 ổ đĩa, bạn có thể sử dụng usb cắm vào, do mega 2560 bảng thực sự là một usb vào cổng nối tiếp, vì vậy cắm vào nếu bình thường, sẽ được nhiều hơn một cổng nối tiếp ra.
2.1 trình điều khiển cài đặt hệ điều hành Windows
Khi bạn cài đặt các Arduino IDE, IDE đến thư mục, trong đó có một
tài xế
thư mục, tìm đi sau khi
mega2560 R3
từ inf file, nếu không, thư mục này nên có một tập tin nén, giải nén sau khi bạn có thể Tìm tệp tin này, nhấp chuột phải vào cài đặt trên đó. Đây là cắm mega2560 hội đồng quản trị, nó phải là thiết bị nhận biết.
3, dụng cụ và phụ kiện
DIY máy in 3d không phải là công cụ cần thiết, gần như không thể hoàn thành, tất nhiên, các phụ kiện cần thiết cũng rất cần thiết.
3.1 công cụ phổ biến
Các công cụ có thể được sử dụng để thử nghiệm hoặc cài đặt bộ máy in 3D bao gồm tua vít xé rách, máy cắt dây, gioăng, bàn hàn điện, nhíp, miếng, kìm mũi kim, băng nhiệt độ cao và nhiều thứ nữa.
Hỗ trợ 4
3.2 Phụ kiện
Một máy in 3d hoàn chỉnh bao gồm hàng chục hoặc thậm chí hàng trăm bộ phận. Nếu bạn muốn hoàn thành việc kiểm tra sau, hoặc các thành phần của một máy in, bạn nên có về phần:
- 3D Printer Master Suite: chủ yếu là chứa một mega 2560 Ban kiểm soát, một bảng và bốn mở rộng RAMPS1.4 4988 bước board điều khiển động cơ;
- 12V 200W chuyển mạch cung cấp điện: điện áp 12V để cung cấp, ATX cung cấp điện có thể được sử dụng trên máy tính, nhưng hệ thống dây điện lưu ý;
- 2 100k thermistor ntc: để đạt được kiểm soát nhiệt độ của hội đồng quản trị đầu sưởi ấm và sưởi ấm giường, nhu cầu có hai cảm biến nhiệt độ, cách thuận tiện nhất để thermistor ntc, điện trở 100k là một lựa chọn tốt (trực tiếp nhất hỗ trợ firmware);
- ít nhất bốn dây hai pha động cơ bước: Nếu bạn là một thử nghiệm đơn giản rằng chỉ có một đòi hỏi các động cơ bước biến để hoàn thành một bài kiểm tra, nếu bạn muốn có một thành phần kết thúc, bạn cần phải stepper motor 4-5, động cơ Z-trục điều khiển theo hai cấu trúc cơ khí khác nhau đó. mô hình động cơ cần phải chọn tình trạng của mình, động cơ 42 có thể được chung chung có thẩm quyền, cần lưu ý rằng 4988 là lái xe tối đa hiện hỗ trợ 2A;.
- ít nhất một giới hạn chuyển đổi: chuyển đổi giới hạn được sử dụng để xác định vị trí của máy in cảm biến quan trọng, để tạo thành một máy in hoàn chỉnh đòi hỏi ít nhất ba để giúp ngăn chặn máy in xác định vị trí nhà, giới hạn chuyển đổi nhiều loại, có thể là cơ khí, quang học, từ tính (Hall) và tương đương;
- 12V nóng: nếu bạn là FDM cơ khí (nóng chảy máy in), sau đó ống sưởi ấm là gần như bắt buộc, được sử dụng vào đầu nhiệt trên, ống nhiệt có thể được lựa chọn để 12V 40W. Nếu bạn thật chặt kiểm soát hội đồng thi là bình thường, bạn không thể, bởi vì có rất dốc đèn LED trên bảng, để biết liệu điện;
- 12V quạt: Quạt để làm mát, không có nhiều cần lưu ý, cần phải chú ý Là tích cực và tiêu cực của các fan hâm mộ phải được kết nối, nếu không nó sẽ không quay, bạn chỉ có thể xác định xem công việc dẫn đầu bởi hướng dẫn;
- 12V nóng giường của PCB: Để làm cho nó dễ dàng hơn cho các tài liệu in tôn trọng nền tảng in ấn, và để ngăn chặn sự biến dạng trong quá trình làm mát (chủ yếu là vật liệu ABS), nếu vật liệu PLA in, hội đồng quản trị có thể không được yêu cầu, nếu thử nghiệm có thể được thể hiện bằng chỉ dẫn ;
4, sẵn sàng để bắt đầu
Nếu bạn có phần mềm và phần cứng trên đã sẵn sàng, sau đó bạn có thể nhập liên kết tiếp theo.
Thứ hai, cấu hình phần vững và tải lên phần vững
Mega 2560 bảng tương đương máy in 3d trong não, trong đó kiểm soát tất cả các phụ kiện in ấn 3d để hoàn thành công việc in ấn phức tạp, nhưng mega2560 không được sử dụng trực tiếp, cần phải tải lên (upload) firmware (firmware) có thể được sử dụng.
1, tải về phần vững - Marlin, Marlin phần vững do mạnh mẽ và dễ sử dụng, vì vậy ở đây cho thời gian chỉ được giới thiệu phần mềm Marlin.
2, cấu hình các thông số phần vững
Sau đây là cần phải cấu hình các thông số. Không đề cập đến các tham số mặc định có thể được.
#define BAUDRATE 250000
Đây là cấu hình của tốc độ cổng truyền nối tiếp, chỉ có tốc độ truyền PC và firmware baud tương tự để có thể giao tiếp thành công, bạn cần phải chú ý. Tất nhiên, không thể dễ dàng thay đổi, tỷ lệ baud phổ biến: 2400,9600,19200,38400,57600,115,200,250000. Trong máy in 3d thường được sử dụng trong ba thứ hai.
#define MOTHERBOARD 33
Tham số này là loại cấu hình của hội đồng quản trị, điều khiển máy in 3d loại bảng là rất lớn, mỗi bảng io cấu hình là khác nhau, vì vậy tham số này phải giữ cùng một loại bảng bạn sở hữu, hoặc không sử dụng. Ban của tôi là phiên bản RAMPS1.4, cấu hình tương ứng phải là 33 (cấu hình đầu in đơn), và 34 (cấu hình đầu kép). Nếu bạn đang sử dụng bảng khác, hãy tham khảo ý kiến bên cạnh và chọn cấu hình thích hợp.
# xác định TEMP_SENSOR_0 3
#define TEMP_SENSOR_BED 3
Hai tham số này cấu hình kiểu cảm biến nhiệt độ tương ứng. Điều quan trọng là để đọc các thông số nhiệt độ là bình thường, nếu đọc nhiệt độ không bình thường sẽ không hoạt động hoặc thậm chí có một mối nguy hiểm tiềm năng lớn (đốt các thiết bị, vv). Nếu bạn sử dụng các cảm biến nhiệt độ khác cần phải thay đổi theo tình hình.
#define EXTRUDE_MINTEMP 170
Tham số này là những rủi ro tiềm ẩn khi nhiệt độ không đạt được và để ngăn chặn hoạt động đùn, nếu bạn làm máy in 3d khác, chẳng hạn như một người bạn để làm cho máy in sô cô la, nhiệt độ đùn chỉ 45 độ, sau đó các thông số cần Định cấu hình cho các giá trị thấp hơn, chẳng hạn như 40 độ.
BOOL true X_ENDSTOPS_INVERTING = const;
const = BOOL Y_ENDSTOPS_INVERTING true;
const = BOOL Z_ENDSTOPS_INVERTING true;
ba tham số ở đây được bố trí cho mỗi 3 trục kiểu tắc giới hạn, cấu hình là đúng, đầu ra mặc định là một công tắc giới hạn 1, trạng thái được kích hoạt Đầu ra là 0, nghĩa là, giới hạn cơ học phải được nối với phân khúc mở. Nếu bạn thường đóng phân khúc, sẽ đúng với sai.
INVERT_X_DIR #define sai
#define INVERT_Y_DIR true
hai thông số này là sai dễ dàng hơn. Tùy thuộc vào loại rào cản cơ học, hai cấu hình không giống nhau. Nhưng nguyên tắc là để đảm bảo rằng nguồn gốc nên (như [max, max] vị trí nhà) ở góc dưới bên trái của nền tảng in ấn (nguồn gốc vị trí [0,0]), hoặc góc trên bên phải. Chỉ sau đó in ra các mô hình là chính xác, nếu không nó sẽ là một hình ảnh phản chiếu của một trục góc phương vị không phải là do mô hình.
# xác định X_HOME_DIR -1
# xác định Y_HOME_DIR -1
#define Z_HOME_DIR -1
nếu vị trí xuất phát đến một tham số giá trị tối thiểu là -1, nếu giá trị lớn nhất của vị trí gốc được sắp xếp để 1.
#define X_MAX_POS 205
#define X_MIN_POS 0
#define Y_MAX_POS 205
#define Y_MIN_POS 0
#define Z_MAX_POS 200 là
Z_MIN_POS #define 0
các thông số này là các thông số quan trọng của kích cỡ in, tài liệu tham khảo ở trên để các hệ tọa độ của FIG điền cần lưu ý ở đây là trung tâm phối về nguồn gốc không được in, trung tâm in ấn nói chung là đúng [(x.max-x.min) / 2, (y.max-y.min) / 2]. Tọa độ của vị trí trung tâm đằng sau nhu cầu sử dụng các công cụ để cắt, in tọa độ trung tâm nên được cấu hình để phù hợp với các thông số ở đây, nếu không nó có thể được in bên ngoài nền tảng này.
#define HOMING_FEEDRATE {50 * 60, 50 * 60, 4 * 60, 0}
cấu hình tốc độ dẫn đường bằng mm mỗi phút, nếu bạn đang sử dụng dây đai truyền động trục xy, trục z của ổ vít, tham số này có thể được sử dụng Giá trị mặc định.
#define DEFAULT_AXIS_STEPS_PER_UNIT {85,3333, 85.3333,2560,158.8308}
Tham số này là kích thước của máy in để in các thông số quan trọng nhất là chính xác, có nghĩa là số lượng các thông số xung cần thiết để chạy mỗi 1mm trục, tương ứng x, y, z, e bốn trục. Trong hầu hết các trường hợp, con số này cần tính toán riêng. Bạn có thể tham khảo http://calculator.josefprusa.cz/#steppers
Tại thời điểm này, các thông số được sử dụng phổ biến nhất đã được cấu hình, bạn có thể bắt đầu. Ngoài ra, nếu bảng 2004lcd cũng cần phải thay đổi
// # DEFINITION REPRAP_DISCOUNT_SMART_CONTROLLER xóa
mặt trước
//
có thể được sử dụng bình thường.
3, tải lên phần vững
Trước khi tải lên, cửa sổ người dùng cần phải cài đặt trình điều khiển trước thời hạn. Cấu hình loại board: Tools> Board> Arduino Mega 2560 hoặc Mega ADK, như thể hiện
RAMPS1.4 bảng điều khiển bảng điều khiển in ba chiều và thử nghiệm (in lại) - đường bay97 - cơ sở khách
Cấu hình cổng nối tiếp: Tools> Serial Port> Số serial của bạn tương ứng với mega board thường là cuối cùng. Như được hiển thị
RAMPS1.4 bảng điều khiển bảng điều khiển in ba chiều và thử nghiệm (in lại) - đường bay97 - cơ sở khách
Nhấp vào nút kiểm tra để kiểm tra lỗi, và sau đó nhấp vào nút mũi tên bên phải để tải lên phần vững, như được hiển thị
RAMPS1.4 bảng điều khiển bảng điều khiển in ba chiều và thử nghiệm (in lại) - đường bay97 - cơ sở khách
Quá trình tải lên, 2560 bảng TX RX và L tương ứng với ba đèn LED sẽ nhấp nháy. Nếu bạn không nhấp nháy, quá trình tải lên hoàn tất
Tải lên thông báo đã hoàn thành
RAMPS1.4 bảng điều khiển bảng điều khiển in ba chiều và thử nghiệm (in lại) - đường bay97 - cơ sở khách
Nếu upload thành công, bạn có thể tiến hành các bước tiếp theo, nếu vấn đề không thể được tải lên tải lên, xem các mẹo hộp dưới đây IDE, xác nhận là để giải quyết và sau đó tải lên các vấn đề, sai lầm thường gặp board loại lỗi lựa chọn, lựa chọn nối tiếp Lỗi và vân vân.
Thứ ba, bộ nhớ RAMPS1.4
RAMPS1.4 như mega2560 đã được chèn vào bảng mega trên. Vì vậy, để cho mega board có thể kiểm soát công việc của máy in 3d. Dây là điều cần thiết trên đường dốc, không chỉ không thể chọn in sai, hoặc thậm chí đốt cháy các thiết bị và máy bay. Hãy cẩn thận.
chức năng phân phối RAMPS1.4 của hội đồng quản trị, hãy tham khảo hình minh họa để ngăn chặn một sai lầm, xin vui lòng liên tục khẳng định các lĩnh vực sau sau khi bật nguồn,
* điện cực là đúng?
* RAMPS chỉ có điện áp 12V, không có truy cập 5V.
* 4988 bảng điều khiển để đảm bảo rằng không có misplacement và đảo ngược (nếu lỗi, quyền lực sẽ đốt cháy hội đồng quản trị).
*
Có thể tham khảo hình sau:
RAMPS1.4 bảng điều khiển bảng điều khiển in ba chiều và thử nghiệm (in lại) - đường bay97 - cơ sở khách
RAMPS1.4 bảng điều khiển bảng điều khiển in ba chiều và thử nghiệm (in lại) - đường bay97 - cơ sở khách
Cuối cùng, các ramps1.4 chèn vào bảng mega2560, cẩn thận không để sai địa điểm. Bạn nên kiểm tra kỹ trước khi quyền lực, để không được cẩu thả. Sai sẽ dẫn đến hậu quả của công việc không thể là bình thường. Nếu không có vấn đề, bạn có thể kết nối cáp USB, và cung cấp điện 12V.
Thứ tư, kết nối máy chủ và làm một điều khiển bằng tay đơn giản
Nếu thao tác trước đó trôi chảy, bây giờ bạn có thể cắm cáp USB, mở phần mềm máy in printrun. Khi mega2560 được bật, LED1 (xanh) trên bảng RAMPS nhấp nháy vài lần. Điều này cho thấy phần mega2560 hội đồng quản trị đang bắt đầu.
1, thông qua máy chủ để kết nối bảng
RAMPS1.4 bảng điều khiển bảng điều khiển in ba chiều và thử nghiệm (in lại) - đường bay97 - cơ sở khách
Như đã trình bày ở trên, mở phần mềm, chọn đúng cổng nối tiếp, thiết lập tốc độ truyền chính xác (cần phải phù hợp với cấu hình phần mềm), bấm vào kết nối. Nếu kết nối là bình thường, bên phải của khu vực nhắc, sẽ có tương tự như những lời khuyên sau đây:
... Kết nối
Bắt đầu
in bây giờ đã Online.
Echo: Reset ngoài
Marlin 1.0.0
vang: Lần cập nhật cuối: 08 Tháng Chín 2013 15:04:20 | Tác giả: (MakerLab, mặc định config)
Biên soạn: 08 Tháng Chín 2013
vang: Free Memory: 4260 PlannerBufferBytes: 1232
echo: Cài đặt Mặc định Hardcoded Đã tải
Ngoài ra, khu vực hoạt động đồ hoạ trái trở thành một màu hoạt động được. Kiểm tra đường cong nhiệt độ bên cạnh tùy chọn đồng hồ, bạn có thể nhận được các điều kiện thời gian thực, như được hiển thị bên dưới.
RAMPS1.4 bảng điều khiển bảng điều khiển in ba chiều và thử nghiệm (in lại) - đường bay97 - cơ sở khách
2, kiểm tra nhiệt độ là chính xác (chỉ sau đó 5V)
Nếu các hoạt động trên là chính xác, bạn có thể thấy rằng nhiệt độ của hai cảm biến nhiệt độ, và nhiệt độ nên nhiệt độ phòng, véo sự thay đổi về nhiệt độ có thể được nhìn thấy ở trên. Nếu bạn đọc nhiệt độ là 0 độ, đảm bảo kết nối là chính xác, vẫn còn những vấn đề cần kiểm tra các thông số firmware.
3, kiểm tra ba đầu ra (để được kết nối với 12V)
Kết nối nguồn điện 12V, nhấp vào nút màu đỏ ở hình bên dưới, hai nút để đặt nhiệt độ, nút quạt (lệnh M106 ở bên phải nếu không có quạt để mở nút). Như được hiển thị:
RAMPS1.4 bảng điều khiển bảng điều khiển in ba chiều và thử nghiệm (in lại) - đường bay97 - cơ sở khách
Nếu tại thời điểm này RAMPS1.4 đã thắp ba đèn LED đỏ, nó cho thấy rằng kiểm tra đầu ra đã thành công.
4, kiểm tra động cơ và ổ đĩa (cần phải kết nối 12V)
Kết nối 4 dây của động cơ bước tới đầu ra động cơ trục X.Nếu màu của động cơ của bạn là màu tiêu chuẩn, bạn có thể kết nối chúng theo thứ tự màu xanh-xanh-đen.Nếu màu đường dây của bạn không phải là tiêu chuẩn hoặc không có sự khác biệt màu sắc, Bạn cần phải tìm hiểu thông qua hướng dẫn vận hành bằng động cơ mà một trong 4 giai đoạn mà đường dây đó thuộc về và cột nào cần, và sau đó cài đặt pha B pha âm - pha B dương - pha A pha tích cực A nối kết âm (có các phương pháp dây khác, Motor nguyên tắc).
4.1 xyz kiểm tra động cơ ba trục
Nhấp chuột vào máy chủ ở phía bên trái của khu vực hoạt động bằng tay, kiểm tra xyz ba trục. Nếu chỉ có một động cơ đã hoàn thành thử nghiệm trục, sau đó cắm nó vào trục khác.
RAMPS1.4 bảng điều khiển bảng điều khiển in ba chiều và thử nghiệm (in lại) - đường bay97 - cơ sở khách
Kiểm tra dòng chảy:
động cơ đầu tiên cộng với một hướng hoạt động trục, động cơ nên theo hướng tích cực, sau đó động cơ tương ứng với trục tiêu cực của hoạt động trục, động cơ nên được đảo ngược, lặp lại các hoạt động trên.
Cần lưu ý rằng phần mềm cơ bản để ngăn máy in bị treo, ít hơn vị trí tối thiểu và lớn hơn vị trí tối đa mà động cơ sẽ ngừng di chuyển. Đó là để nói sẽ không luôn luôn thêm hoặc trừ, động cơ sẽ biến.
4.2 máy kiểm tra máy đùn
Quá trình đùn được thực hiện bởi vì phần mềm không cho phép nhiệt độ đạt được nhiệt độ đùn tối thiểu (thông số trong phần mềm). Vì vậy, nếu bạn kết nối máy ép đùn thật với vật liệu trong đó, đừng kiểm tra máy đùn ở nhiệt độ dưới 230 (abs) và 185 (pla).
Phương pháp thử:
1, nhiệt độ được làm nóng đến nhiệt độ phun ra tương ứng với vật liệu, PLA: 185 độ, ABS: 230 độ, và sau đó được kiểm tra, động cơ Extrude cho hành trình ép đùn, Reverse cho hành động trở lại. Nếu hướng mong muốn là ngược lại với hướng thực tế, chỉ cần đảo ngược tất cả 4 dây dẫn tới đầu motor.
5, kiểm tra chuyển đổi giới hạn
RAMPS1.4 cho tổng cộng sáu công tắc giới hạn tương ứng, X-min, X-max, Y-min, Y-max, Z-min, Z-max. Trong số này, ít nhất 3 phải được sử dụng để xác định nguồn gốc của máy in, có thể là giới hạn vị trí min hoặc max của trục (được định cấu hình trong phần vững). Giới hạn chuyển đổi theo các hình thức khác nhau của dây cũng khác nhau, cơ giới hạn chuyển đổi chỉ cần kết nối hai phân đoạn có thể (tiêu cực và tín hiệu), quang điện, chuyển đổi Hall thường cần phải kết nối ba phân đoạn (tích cực, tiêu cực và tín hiệu ).
Tôi kiểm tra ở đây với vị trí 3 trục min để làm nguồn gốc của cấu hình. Bộ chuyển mạch giới hạn đo kiểm phải được nối với vị trí min của mỗi trục. Sau đó, các nút trục cơ sở kiểm tra chủ, trục tương ứng của động cơ nên bắt đầu quay, và sau đó nhấn công tắc giới hạn của trục tương ứng hai (để nâng cao độ chính xác, đáp ứng một vài milimet trở lại và sau đó gặp là nguồn gốc thực sự), điều này Động cơ nên ngừng xoay. Các hoạt động trên được lặp lại trên các trục khác để thử nghiệm.
6, kiểm tra hoàn tất
Nếu bài kiểm tra trên được hoàn thành, bạn có thể bắt đầu cài đặt mọi thứ trên kệ. Cần quan tâm đến mối quan hệ tương ứng giữa mỗi trục và mỗi công tắc giới hạn.
Thứ năm, kiểm tra và sửa đổi và tải lại phần vững
Nếu bạn gặp sự cố với phần mềm, bạn nên lặp lại phần cấu hình phần mềm.
Nhiều lỗi dễ bị lỗi hơn là: cấu hình chuyển mạch giới hạn, số xung trên một milimet.
Sáu, cắt cấu hình phần mềm
Phần mềm cắt lát là một công cụ tạo ra mã có thể được nhận diện bởi bảng điều khiển chính của máy in. Nếu không có sự trợ giúp của phần mềm này, máy in không nhận dạng các tệp mô hình 3D. Ở đây chỉ giới thiệu phần mềm slice này của Slic3r. Dễ sử dụng và mạnh mẽ.
1, mở chế độ chuyên gia
Slic3r mặc định là chế độ đơn giản, nhưng tôi khuyên bạn nên mở chế độ chuyên gia trực tiếp để cung cấp kiểm soát tốt hơn của máy in. Tôi ở đây phiên bản mac như một ví dụ, các phiên bản khác làm tương tự như hoạt động.
RAMPS1.4 bảng điều khiển bảng điều khiển in ba chiều và thử nghiệm (in lại) - đường bay97 - cơ sở kháchRAMPS1.4 bảng điều khiển bảng điều khiển in ba chiều và thử nghiệm (in lại) - đường bay97 - cơ sở khách
Như được đặt ở trên, sau khi khởi động lại sẽ vào chế độ chuyên gia.
2, cài đặt in
Cấu hình in, cấu hình liên quan đến in sẽ nằm trong phần này. Một số máy in tương tự sử dụng cấu hình in khác nhau khi in trên các mô hình khác nhau để đạt được kết quả tốt nhất.
2.1 Các lớp và viền xung quanh cấu hình lớp và cạnh
RAMPS1.4 bảng điều khiển bảng điều khiển in ba chiều và thử nghiệm (in lại) - đường bay97 - cơ sở khách
Lớp height: chiều cao của mỗi lớp in, đầu in khuyến tầng 0.3 0.4mm hoặc ít hơn, chiều cao của, chính xác in nhỏ cao, cùng một mô hình là lần in lâu hơn. Tôi đặt là 0.3mm.
chiều cao lớp đầu tiên: lớp đầu tiên thường là tốt hơn để dính vào nền tảng này, câu chuyện sẽ được nhỏ hơn một số người khác, chẳng hạn như khoảng 50%, tôi đặt ở đây là 0.2mm.
Perimeters: dùng để chỉ số lượt in trên mép của mỗi lớp. Mặc định là 3 lớp. Không có nhu cầu đặc biệt để giữ mặc định.
Các lớp rắn: Bao nhiêu lớp được yêu cầu phải được điền đầy đủ vào lớp dưới cùng và trên cùng, theo mặc định, tất cả ba lớp đều có thể được.
Các tham số khác theo mặc định.
2.2 Cấu hình điền đầy
RAMPS1.4 bảng điều khiển bảng điều khiển in ba chiều và thử nghiệm (in lại) - đường bay97 - cơ sở khách
Mật độ đầy: điền tỷ lệ, tối đa 1 (100%), tối thiểu 0, sức mạnh lý thuyết lớn hơn, tất nhiên, nhiều thời gian và vật liệu đã chi tiêu nhiều hơn. Nói chung, 30% tỷ lệ thực hiện đã đáp ứng hầu hết nhu cầu in.
Mẫu điền: Khi điền mẫu giống như, bạn có thể giữ mặc định, bạn có thể tìm thấy chế độ yêu thích của mình. Lấp đầy mỗi lớp: Mỗi lớp được lấp đầy, mặc định là để điền vào mỗi lớp.
Các cấu hình khác có thể theo mặc định.
2.3 Tốc độ in tốc độ cấu hình
RAMPS1.4 bảng điều khiển bảng điều khiển in ba chiều và thử nghiệm (in lại) - đường bay97 - cơ sở khách
2.4 Xoáy viền và in lề đường viền
RAMPS1.4 bảng điều khiển bảng điều khiển in ba chiều và thử nghiệm (in lại) - đường bay97 - cơ sở khách
Váy: đề cập Trước khi in ấn, làm một phác thảo xung quanh mô hình in của hành động để bảo vệ sự đùn lụa bình thường, và cung cấp cho bạn thời gian để tìm vấn đề, chẳng hạn như là nền tảng không đồng đều, các vấn đề nền tảng chiều cao, người đứng đầu đùn và vân vân.
Bảy, bắt đầu in
Nếu bạn đã hoàn tất thành công tất cả các bước trên, máy in của bạn sẽ có thể bắt đầu làm việc
Liên hệ:
Bước 1: Lựa chọn sản phẩm cần mua bấm Thêm vào giỏ hàng Bước 2: Sau khi chọn hết sản phẩm thì bấm biểu tượng Giỏ hàng để thanh toán Trong mục này bạn có thể thay đổi số lượng, chủng loại sản phẩm và chọn mua thêm sản phẩm khác. Bước 3: Lựa chọn Thanh toán Bạn vui lòng nhập thông tin: Email, Họ tên, Số điện thoại và các thông tin cần thiết khác. Để theo dõi được đơn hàng của mình bạn vào mục Đăng nhập hoặc Đăng ký tài khoản rất dễ dàng. Bước 4: Xem lại thông tin đặt hàng, điền chú thích và gửi đơn hàng Bước 5: Sau khi nhận được đơn hàng bạn liên hệ 0393451866 để chúng tôi gửi hàng sớm nhất. Bước 6: Web chúng tôi có công cụ Kiểm tra đơn hàng ngay bên trên tay phải. bạn nhập SĐT để kiểm tra tình trạng đơn hàng nhé Trân trọng cảm ơn.







