
-
-
-
Tổng tiền thanh toán:
-
TỰ ĐỘNG HÓA ĐỘNG CƠ BƯỚC
14/06/2021

Hãy thử đưa đầu ngón tay của bạn chạm vào mũi, thật dễ dàng đúng không? Giờ hãy thử nhắm mắt lại và làm lại động tác đó, vẫn là dễ dàng đối với con người. Bởi cơ thể con người chủ yếu được điều khiển bởi não bộ. Không cần thiết phải sử dụng quá nhiều các giác quan để chạm đầu ngón tay vào mũi. Giờ hãy tưởng tượng xem cách người ta chế tạo một con robot với độ chính xác cực cao tương tự như con người, thì điều gì khiến nó có thể chính xác được đến như vậy. Đó chính là sử dụng động cơ bước, các động cơ điện thông thường thường có độ chính xác kém, vì thế trong một số ứng dụng họ sẽ lựa chọn động cơ bước thay thế cho các động cơ điện thông thường. Với khả năng di chuyển theo từng bước với góc được xác định rõ và được điều khiển bởi các thiết bị điện tử cho độ chính xác cao. Hãy cùng xem thử chúng hoạt động như thế nào
Động cơ bước khác gì với động cơ thông thường?

Động cơ điện thông thường sử dụng tác dụng từ giữa nam châm và các vòng dây điện để làm quay trục động cơ. Phần chính của động cơ điện gồm phần đứng yên (stator) và phần chuyển động (rotor) được quấn nhiều vòng dây dẫn hay có nam châm vĩnh cửu. Khi cuộn dây trên rotor và stator được nối với nguồn điện, xung quanh nó tồn tại các từ trường, sự tương tác từ trường của rotor và stator tạo ra chuyển động quay cho trục động cơ là rotor. Đó là bản chất của động cơ điện thông thường.
Động cơ điện sử dụng nguồn điện xoay chiều lại được chế tạo hoàn toàn khác nhưng cũng mang bản chất chuyển động tương tự. Từ điện năng cung cấp từ trường tạo ra lực đẩy và hút giúp tạo nên chuyển động quay cho trục động cơ.
Để nói thêm về tính chính xác về động cơ bước, chúng ta giả sử chế tạo một con robot với nhiệm vụ gắp một ly café để lên bàn. Và đầu tiên sử dụng động cơ thông thường sẽ khó có thể xác định được góc cần quay là bao nhiêu và phản hồi lại góc đó một cách chính xác, bởi để điều khiển được động cơ thông thường một cách chính xác chúng ta cần rất nhiều thông số (điện áp, dòng điện, từ thông, các lực ngoại cảnh,…). Và động cơ bước sinh ra để làm điều đó một cách dễ dàng hơn, thay vì cung cấp một lượng điện năng và cánh tay robot quay, động cơ bước có thể xác định được góc quay của nó nhằm đưa ra độ chính xác cao cho quá trình chuyển động
Động cơ bước là gì?
Động cơ bước và động cơ thông thường có 4 điểm khác nhau:
Điểm khác biệt đầu tiên mà chúng ta hay gọi là động cơ không chổi than. Các động cơ thông thường sử dụng các cổ góp chổi than để đảo chiều dòng điện cung cấp vào động cơ nhằm giữ chơ chiều quay của động cơ liên tục. Còn động cơ bước không sử dụng bộ phận đó.
Thứ hai, các động cơ thông thường có cấu tạo gồm stator là các nam châm vĩnh cửu và rotor là các cuộn dây. Còn động cơ bước thì ngược lại. Stator là các cuộn dây còn rotor là các nam châm vĩnh cửu. Và điều đó làm cho các cuộn dây ở trạng thái không chuyển động giúp cho việc không sử dụng chổi than.
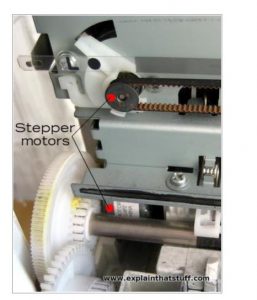
Thứ ba, điểm mà làm động cơ bước có khả năng quay đúng góc độ theo từng bước như cái tên của nó. Đó là cấu tạo của rotor là nam châm được chia thành nhiều phần riêng biệt, trông giống như bánh răng và các cuộn dây phần stator cũng có những bánh răng tương tự. Các bánh răng này cung cấp xung từ trường hút và đẩy giúp cho động cơ có thể quay theo từng bước nhỏ.
Điểm khác biệt cuối cùng đó là động cơ bước có khả năng dừng lại và giữ ở một vị trí nhất định và một góc cụ thể. Điều này rất quan trọng khi cung cấp sức mạnh cho một cánh tay robot, có nghĩa là một phần của cánh tay robot sẽ phải ở yên vị trí đó trong khi phần khác của cánh tay hoạt động. Hay còn được gọi là momen giữ, giữ cho trục động cơ không di chuyển.
Động cơ bước hoạt động như thế nào?
Cấu tạo cơ bản
Cấu tạo đơn giản của động cơ bước được hiểu như sau: Phần rotor bên trong của động cơ sẽ quay theo từng bước, và phần stator bên ngoài tạo nên từ trường để đẩy phần rotor theo từng bước nhỏ đó.

Phần Rotor
Phần rotor được cấu tạo từ nam châm với 2 điện cực bắc và nam và có hình dạng như các bánh răng. Nếu khó hình dung thì bạn hãy tưởng tượng với hai bàn tay của mình, tay trái là cực bắc và tay phải là cực nam. Khi đặt hai bàn tay chồng lên nhau và xen kẽ các ngón tay với nhau ta được phần rotor của động cơ bước.
Phần Stator
Phần stator của động cơ bước được cấu tạo từ các cuộn dây điện, trong ví dụ này sẽ là 4 cuộn dây điện hoạt động theo cặp và có thể đồng thời bật tắt tạo ra từ trường trái dấu theo gặp. Và chúng hoạt động cùng nhau để tạo ra chiều quay cho động cơ bước. Góc quay còn phụ thuộc vào số bánh răng trên rotor và số cuộn nam châm điện ở phần stator
Làm thế nào để động cơ bước quay?
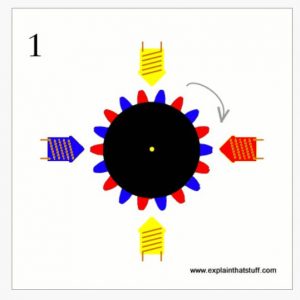
- Hãy chia động cơ thành 2 phần trái và phải theo trục động cơ. Khi cấp điện cuộn nam châm bên phải trở thành cực bắc (màu đỏ) còn cuộn nam châm bên trái trở thành cực nam (màu xanh). Làm cho rotor quay một bước và lúc đó một bánh răng có tính cực nam sẽ bắt khớp vào bánh răng của cuộn nam châm bên phải có tính cực bắc. Tương tự với bên trái.
- Tiếp đến cuộn nam châm bên dưới sẽ được cấp điện và mang tính cực bắc, cuộn nam châm phía trên sẽ mang tính cực nam. Và cũng như phần đầu, một bánh răng sẽ khớp với bánh răng còn lại của cuộn nam châm. Và như vậy rotor quay được thêm một bước nữa.
- Cứ như vậy, các cuộn nam châm dọc và ngang thay phiên nhau bật tắt và các bánh răng của rotor lần lượt khớp với các bánh răng của stator. Tạo nên chuyển động quay theo bước cho động cơ.
Hãy nhớ rằng, động cơ bước không được thiết kế để quay liên tục bằng cách gửi tín hiệu liên tục đến các cuộn nam châm ở stator, chúng ta chỉ có thể làm cho nó quay với một số lượng bước yêu cầu cho trước nhất định.
Các loại động cơ bước
Đây là một giới thiệu đơn giản về các loại động cơ bước và sẽ không đi sâu vào tìm hiểu các điểm khác biệt của chúng. Có một số thuật ngữ kỹ thuật sẽ không được giải thích ở trong bài viết.
Poles
Một động cơ bước có nhiều các cực bắc và nam xen kẽ nhau được gọi là Poles. Chúng có khả năng quay rotor với các bước nhỏ. Điều này làm cho loại động cơ này có khả năng chính xác cao
Phases

Một động cơ bước kiểu phases được hiểu là sẽ không có khả năng quay những bước nhỏ. Nó được thiết kế để quay theo những pha nhất định ví dụ như có 4 phases quay được 45 độ mỗi bước, có 2 phases sẽ quay được 90 độ mỗi bước, có 3 phases sẽ quay được 120 độ mỗi bước,….
Ưu và nhược điểm của động cơ
Lý do để bạn chọn sử dụng động cơ bước là vì khả năng điều khiển chính xác của nó với một góc quay được xác định. Nhưng cũng có một vài hạn chế, động cơ bước đôi khi khá giật vì mỗi mẫn quay và dừng tạo ra xung đột, chắc chắn điều này bạn sẽ không mong muốn khi gắn lên một cánh tay robot đòi hỏi độ chính xác cao. Giải pháp cho việc chống giật là sử dụng một loại động cơ tên là servo, nó được điều khiển trơn tru hơn, và có cơ chế phản hồi tích hợp. Nói một cách đơn giản là tích hợp encoder để phản hồi. Động cơ servo có cấu tạo phức tạp hơn nên cũng đắt hơn.
Ai là người sáng chế ra động cơ bước
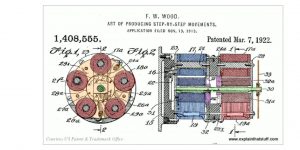
Frank W.Wood, trong những năm từ 1912 đến 1918 ông đã nộp một vài các bản thảo sáng chế và được cấp chính thức vào ngày 7 tháng 3 năm 1922. Tiêu đề của bản sáng chế là “Nghệ thuật tạo ra các chuyển động từng bước” trong đó sử dụng 5 vòng nam châm điện để làm cho một cặp nam châm bên trong quay. Theo cách nói của Wood thì thiết bị của ông tạo ra “chuyển động từng bước cho một phần tử quay và được cung cấp bởi các mạch điện từ”